学科のご紹介
生産技術科
制御技術科
カリキュラム・シラバス
卒業研究
講師紹介
トピックス
電子技術科
産業デザイン科
情報技術科
学生・企業の声
卒業生の声:わたしは女性エンジニア
卒業生の声:わたしは女性エンジニア第2弾
学生作業着検討P
授業評価制度
卒業制作・研究の紹介
2年間の勉学の集大成を卒業制作・研究として作品に表現します。テーマや内容は担当教官と話し合いを重ねながらひとつの形に仕上げていきます。
自動化システムの製作


ワークの色をセンサで識別し、色ごとに分別するシステムです。 加工やロボットのよる組立てなど工場内の自動化システムをイメージしています。
電動オートバイ



原動機付き自転車を参考にモーターの力で走行できるオートバイを製作しました。 最高速度:24km/h。 走行可能時間:1時間30分以上を達成しました。
迷路探索ロボット


壁で囲まれた迷路を探索し、ゴールを見つけるH8マイコン搭載の自律型ロボットです。
クランプ冶具の機構設計・製作



自動車製造工程、車体溶接クランプ治具を参考として、実際に空気圧で可動するミニチュア版クランプ治具を製作。 2種類のワークの形状を識別して、クランプする際にワークを固定する位置を自動で変化させることが出来ます。
六脚走行ロボット
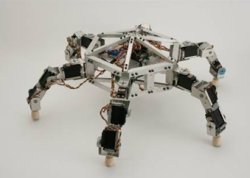
六脚で歩行。裏返しになっても、足の方向を変えることで歩き続けることが出来ます。
四脚走行ロボット
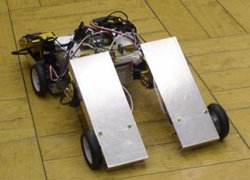
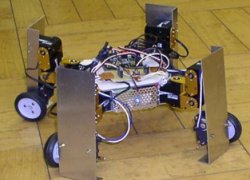
ボタン一つで変形し、歩行形態で歩くことと走行形態で走ることの両方が出来ます。